測試平臺的定位控制與數據采集程序的綜合設計用于完成測試平臺的一些必要功能,具體包括測試平臺的復位、測試平臺的參數設置、測量、測試平臺標定、手動操作、數據接口測量。因此在程序設計時,具體設計了系統復位、系統測量參數設置、系統測量、系統標定、手動操作、數據接口測量這幾個功能模塊。
(1)系統復位
圖5-25是系統復位程序的LabVIEW前面板。通過該前面板,可以分別設置X軸、Y軸、Z軸、R軸的運動控制參數,具體包括每個軸的運動方向、加速度、初始速度和驅動速度。運行系統程序并按下“復位”按鈕后,系統復位程序會依據給定的運動控制參數來搜尋機械原點,當任意一個軸上安裝的定位傳感器搜索到機械原點后,對應的軸馬上停止運動,相應軸的機械原點分坐標的定位完成。

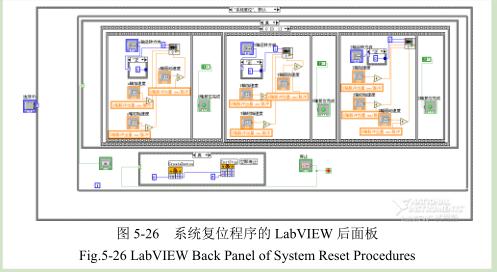
圖5-26是系統復位程序LabVIEW后面的板。其編程思路是:首先通過條件結構判斷是否按下復位按鈕,若按下復位按鈕,則執行條件判斷結構里面的層疊式順序結構程序;執行層疊式順序結構程序時,先執行層的程序,層的程序里面又有三個平鋪順序結構,這三個平鋪順序結構在程序執行時的時間是同步進行的,在每一個平鋪式順序結構里面,把控制伺服電機運動的參數讀取進來并賦給相應伺服電機的定位控制子程序(在系統程序的文件夾里放了X軸伺服電機的定位控制子程序、Y軸伺服電機的定位控制子程序、Z軸伺服電機的定位控制子程序、R軸伺服電機的定位控制子程序),從而同時完成X、Y、Z三軸的機械原點坐標定位;接著再執行R軸的機械原點坐標定位;當任意一個軸的機械原點定位完成后,相應軸的復位完成指示燈會被點亮;在執行系統復位程序的過程中,若按下停止按鈕,系統復位程序里的InstStop函數會使所有伺服電機立即停止運動并退出系統復位程序。
(2)系統測量參數設置
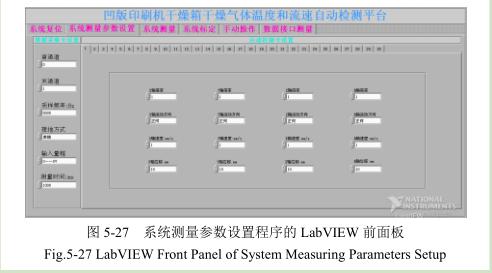
圖5-27是系統測量參數設置程序的LabVIEW前面板。該前面板用于完成系統測量的板卡參數的具體設置,包括USB1020運動控制卡的每個軸的運動控制參數的設置和USB2817數據采集卡的參數設置。在系統測量中,設計每次測量的點數為30個點,需要為每個測量點設置定位控制的參數,包括每個軸的倍率、運轉方向、速度和位移。數據采集卡需要設置的參數包括首末通道、采樣頻率、接地方式、輸入量程和測量時間。
(3)系統標定
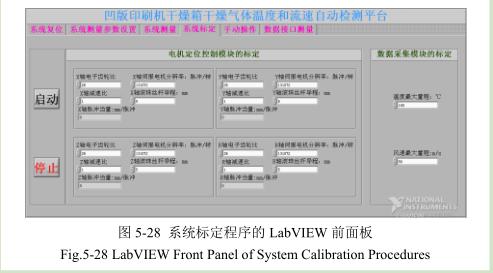
圖5-28是系統標定程序的LabVIEW前面板。通過該前面板,可以分別對電機定位控制模塊和數據采集模塊的參數進行標定。對電機定位控制模塊的標定包括設置每個軸的電子齒輪比、伺服電機編碼器分辨率、機械傳動機構的減速比、滾珠絲桿的導程等,系統標定程序會根據上述參數自動運算出每個軸的脈沖當量,以供其他程序用于計算伺服電機需要走的速度和位移。數據采集模塊的標定需要設置溫度的量程和風速的量程,以適應不同量程的風溫、風速傳感器測量的需要。
http://www.dgzhenghang.cn



 400-822-8565賈小姐/15899697899
400-822-8565賈小姐/15899697899




